摘要:介绍了一种基于单片机控制的六足仿生蟑螂机器人。该机器人在外观和足部结构上模仿蟑螂。六条腿均匀分布在身体两侧,每只脚赋予3个自由度。机器人的步态采用经典的三足步态方式。运动控制器为STC12C5A60S2。它由单片机和伺服器组成。采用多舵机分时控制方式。机器人可以按照设计的步态计划进行前进、后退、左转、右转等动作。同时增加了语音模块,机器人可以按预定程序执行动作。随着音乐表演舞蹈动作。
0 简介
仿生学是生物科学与工程技术融为一体的边缘学科,诞生于20世纪60年代初。它主要通过学习、模仿、复制和再创造生物系统的结构、功能、工作原理和控制机制来改进现有的生物系统。或创造新的机械、仪器、建筑物和流程[1]。蟑螂运动灵活稳定,对地形的适应能力强,是仿生学的研究热点。本文设计的六足仿生爬行机器人的外形和机械结构参考了蟑螂的特征。运动控制器由STC12C5A60S2单片机和伺服组成。采用多服务器分时控制,能根据指令要求正确切换功能,完成相应任务。行动。
1 车身结构设计
仿生蟑螂六足机器人由两个基本部分组成:身体和脚。足部和身体的配置采用正对称分布。由于自然界中大多数蟑螂的身体具有近似矩形的结构,因此将身体设计为以身体纵向中心线为对称轴的多边形,长宽比约为3:1。选用的材料强度高、重量轻。铝合金。 6条足均匀分布在身体两侧。腿的形状是指蟑螂脚的结构。 4个关节是髋关节、大腿关节、小腿关节和踝关节。前3个关节为驱动关节,各关节之间的连杆分别称为基底部、股骨部和胫骨部[2]。三个驱动关节均采用伺服电机驱动,如图1中黑点所示。关节之间的连接部件采用性能良好的合成塑料而不是铝合金,进一步减轻了整机的重量,增加了整机机构的灵活性。 。通过控制相应关节伺服电机的运动,系统使机器人能够实现18个自由度的柔性运动,使行走脚能够在可达区域内自由定位。
2 步态规划
六足仿生机器人通常采用典型的交替三角步态进行直线行走[3],即身体两侧的6条腿分成两组,在三角形支撑结构中交替前进。身体左侧的前后足和右侧的中足为一组,右侧的前后足和左侧的中足为另一组,形成两个分别为三角括号。当一组三角支架的所有脚同时抬起时,另一组三角支架的三条腿保持静止以支撑身体。然后重心前移,以中脚为支点向前移动。同时,身体的重心落在另一组三角形支撑物的三条腿上,然后重复前一组的动作,利用这种交替动作使身体向前移动。

所设计的步行机器人尾部左右两端安装有两个驱动电机。每个驱动电机控制位于其对应侧的前腿和后腿。两条腿中间用铰链连接,使两条腿同向摆动。中间两条腿采用第三驱动电机,可同时驱动中间两条腿顺时针或逆时针旋转20°~30°。当机器人从静止状态开始直线向前移动时,机器人的两条中间腿不旋转,前腿和后腿同时向后移动,导致机器人向前移动。当机器人向右运动时,第三驱动电机驱动中腿顺时针方向旋转一定角度(20°~30°),使机器人向右旋转。此时机器人的重量由右前腿、右前腿、右前腿组成。侧后腿和左中腿支撑,左前腿和左后腿向前移动。同理,当驱动中腿逆时针方向旋转一定角度(20°~30°)时,机器人向左移动。
3 硬件系统设计与实现
3.1 STC12C5A60S2芯片简介
STC12C5A60S2/AD/PWM系列单片机是宏晶科技生产的单时钟/机器周期(1T)单片机。它是新一代高速、低功耗、超强抗干扰的8051单片机。其指令代码与传统8051完全兼容,但速度快8~12倍;内部集成MAX810专用复位电路、2路PWM、8路高速10位A/D转换(250k/s),适用于电机控制和强干扰场合。 。 STC12C5A60S2系列微控制器几乎包含了数据采集和控制所需的所有单元模块,可以称为片上系统。
3.2 直流电机及其驱动模块
受机器人框架材料的影响云开·全站体育app登录,机器人本身重量较大,因此对直流电机的扭矩要求非常高。本文选用25GR-370直流减速电机,扭矩约为5公斤/厘米。测试过程中,电机性能稳定,输出扭矩也满足预期设计要求。
直流电机驱动模块采用ST的L298N芯片,可以直接驱动两个46V、2A以下的直流电机,可以轻松控制直流电机的速度和方向,还可以控制两相步进电机。该模块采用光耦芯片TLP521-4来隔离控制信号和L298桥驱动电路的电气连接。当控制信号为低电平时,光耦导通,驱动L298工作。控制信号可以直接连接到单片机的I/O口,这样就消除了单片机无法驱动光耦的问题;输入控制信号与L298桥驱动部分分开分布,并严格单点共用地。上述两项措施最大限度地减少了强电部分对控制电路部分的影响,保证了系统的可靠运行。
L298N驱动器的电路连接图如图2所示。
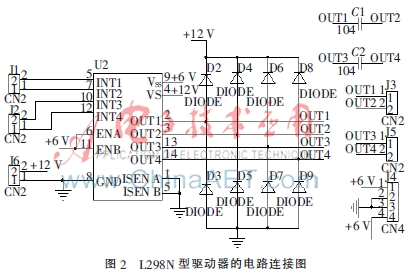
L298有两个电源:逻辑电源和电源电源。图中6V为逻辑电源,由J4接,12V为电源,由J6接; J1、J2是单片机的输入端,分别控制两个电机; J3、J5分别接两台电机的正负极; ENA和ENB直接连接6V逻辑电源,使两个电机始终工作在使能状态。本设计中使用的电机是线圈型的。当它突然从运行状态切换到停止状态或从顺时针状态切换到逆时针状态时,会形成很大的反向电流。因此,电路中添加了一个二极管来泄放电流。 ,保护芯片的安全。
3.3 舵机
舵机是伺服电机,是位置(角度)伺服驱动器,适用于需要角度不断变化和保持的控制系统。这里使用的是Power HD 1501MG舵机。这款舵机的扭矩比较大,达到了17公斤/厘米,完全满足小型简单机器人的需求。伺服驱动模块的输入线有控制信号线、电源线和地线。三根线必须连接准确,否则会损坏单片机控制板。
舵机的控制采用周期为20 ms的PWM(脉冲宽度调制)信号。脉冲宽度为0.5 ms~2.5 ms,对应的舵机角度为-90°~+90°,如图3所示。控制信号从接收通道进入信号调制芯片kaiyun.ccm,获得直流偏置电压。舵机内部有参考电路,产生周期为20 ms、宽度为1.5 ms的参考信号。将得到的直流偏置电压与电位器的电压进行比较,得到电压差输出。最后将正负电压差输出给电机驱动芯片,从而判断电机的正反转。当电机转速恒定时,通过级联减速齿轮带动电位器旋转,使电压差为0,电机停止旋转。使用单片机控制舵机时,常采用定时器和中断来完成控制[4]。
本文设计的仿生爬行动物机器人总共使用了18个舵机。其连接方式参考了蟑螂的足部结构。舵机的连接位置就是图1中的黑点。
3.4 语音模块
语音模块采用华视通讯推出的新一代语音模块HSTAMFP。内部采用华邦工业级语音芯片。功放采用美国进口数字功放。都是昂贵的IC,因此设计了一个大功率、高质量的语音模块,支持6~20k动态采样,在不改变外部时钟的情况下动态加载不同采样率的音频文件。数字功放是迄今为止最好的功放。无需散热器即可实现高功率输出。其效率极高,是常用OTL功率放大器的4至5倍。
4 软件系统设计与实现
4.1 编译软件及芯片添加
它采用C语言编写,在Keil uVision2开发环境中编译和调试。开发界面如图4所示。
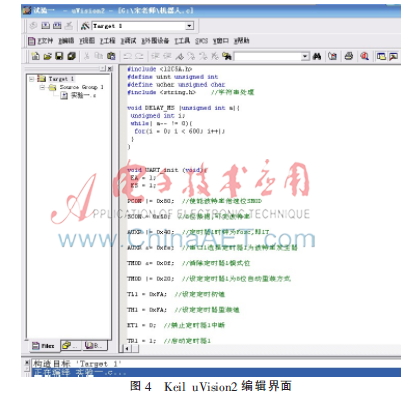
由于Keil uVision2是国外软件,而使用的STC12C5A60S2芯片是国产的,不在Keil uVision2的芯片数据库中,所以需要将国产的STC系列芯片添加到Keil uVision2中才能进行编译。
4.2 编程思路
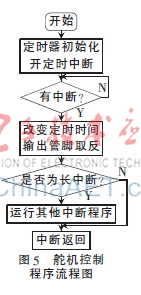
利用定时器和中断完成18个舵机的分时控制。由于伺服信号周期T为20ms,信号脉冲宽度为0.5~2.5ms,因此一个周期最多可以控制8个信号(20ms/2.5ms=8)。将 18 个舵机分为 3 组,定时器 0 控制舵机 1~6,定时器 1 控制舵机 7~12,定时器 2 控制舵机 13~18。首先预加载高电平时间长度kaiyun全站网页版登录,启动定时器,计数溢出时触发中断,拉低电平并重新安装低电平时间长度。舵机控制程序流程图如图5所示。
4.3 舵机控制器软件
为了控制机器人的舞蹈动作,本文采用32通道舵机控制器软件,其工作界面如图6所示。

该软件可以实现上位机对伺服的直接控制。使用方法如下:在电脑上插上蓝牙,打开软件界面,选择蓝牙com端口和波特率,点击界面底部的“导入”和“导入完整值”。 》,选择编译好的伺服控制文件,点击“恢复初始位置”,打开机器人电源开关,在软件界面点击“在线”,当界面闪烁并显示“在线”后点击“恢复”再次点击“初始位置”,最后点击“运行”。机器人将按照预定程序自动执行相应的舞蹈动作。
5 结论
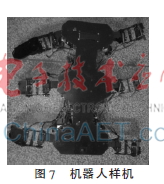
本文设计的六足仿生蟑螂机器人原型机长约16厘米,宽6厘米,高3厘米,重约4.3公斤。其外观如图7所示。对样机进行了行走实验,结果表明样机可以直线行走、左右转弯等,还可以按照既定程序随着音乐跳舞。
参考
[1] 沉敬金.新型六足仿生昆虫结构设计与动力学分析[D].南京:南京航空航天大学,2008。
[2] 张建斌,宋荣贵,陈伟海,等。基于运动柔性的蟑螂机器人机构参数优化[J].北京航空航天大学学报, 2010, 36(5): 513-518.
[3]韩建海,赵树尚,李继顺。六足机器人行走步态协调控制[J].机电工程,2004,21(4):8-10。
[4]楚忠,阮贤石,于刚明.六足仿生机器人步态研究及运动控制器设计[J].伺服控制,2009(8):67-70。






