摘要:水下机器人的开发具有巨大而遥远的意义。水下机器人的运动控制是实现其智慧和国内外热点的关键。本文将对水下机器人应用模糊技术。根据水下机器人的六个弗雷德运动模型,设计了水下机器人模糊控制器和PID控制器,并在模拟环境中进行了测试比较。测试结果表明,模糊技术的方法显然具有更大的优势开yun体育app官网网页登录入口,并且更有利于控制水下机器人的运动。
0简介
高科技的水下机器人为大量资源的发展做出了贡献,因此有必要开发水下机器人。如今,越来越多的地方使用水下机器人来控制水下机器人,以快速而准确地完成人类派遣的任务。水下机器人的工作环境的特殊性也增加了控制水下机器人的困难。因此,水下机器人的控制系统需要强大的自我调节功能和在线模型识别能力[1]。
模糊控制技术基于模糊数学理论,是现代控制理论中的一项高级新技术[2]。它不需要该过程的精确数学模型。它具有强大的鲁棒性和强大的容错性。操作员易于设计和掌握。本文将机器人检查为具有水下状态的实验平台。它的运动系统是非线性,时间变化和强大的耦合。通常,它的水下工作几米甚至更深的水下工作,这受到各种未知因素的干扰[2]。从这个角度来看,使用模糊方法来控制水下机器人的精确锻炼无疑是最好的选择。
1创建运动模型
水下机器人将在水中受到各种力和扭矩。研究在这些力和扭矩的作用下,水下机器人的运动,并建立了水下机器人的运动模型。基本[1]。
1.1水下状态检查机器人的结构

本文将实验室项目“水下状态检查机器人”作为实验平台。水下运动的主题如图1所示。作为系统的主要部分,螺旋桨 - 型水下运动平台配备了6个位置耦合螺旋桨,其中2个垂直推进器用作垂直进步,其他4个垂直推进器,其他4个位置螺旋桨螺旋桨和其他4个位置耦合螺旋桨。推动器用作扁平运动和旋转。分配以确保在锻炼过程中保持水下机器人的平衡,并完成更准确的定位。水下状态检查机器人通过其自身的状态检查和对主控制器的算法控制,可以实现高稳定的悬架和稳定的三维空间运动。达到30 m。
1.2水下状态检查机器人空间运动方程
使用具有六个自由度的空间运动方程,以指示水下实验平台的运动。为了使模型通常,假设水下机器人G和载体坐标系的重心不收敛,则载体坐标系中的G坐标为XG,YG,ZG [1]。
因此,获得的六个无空间空间运动方程如下[1]:
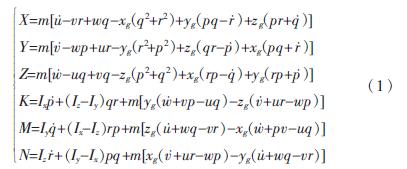
其中,M表示机器人水下状态的机器人检查质量; IX,IY和IZ是每个轴的旋转惯性,与载体坐标系相比; u,vkaiyun全站网页版登录,w,p,q和r是6自由(喇叭)速度;
它是其六个自由度的(角度)加速度; X,Y,Z,K,M和N是其外力(扭矩)。
2个博客控制器
模糊控制的核心是将模糊语言描述用作执行控制的控制规则。与传统控制的理论和方法不同,模糊控制是基于模糊数学理论建立的。
2.1模糊控制系统的组成
模糊控件属于计算机数字控制,该控件通常由5个部分组成:模糊控制器,输入和输出端口,执行机制,受控对象和测量设备。系统框架图如图2 [2]所示。
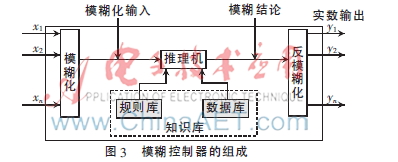
其中,模糊控制器是控制系统的核心部分。它的一般组成如图3所示。该控制器是输入和多个输出模糊控制器。控制规则表中由数学符号组成的规则库;模糊的推理以确定受控对象是否正常运行;接收控制器的输入是输入并转换为可以接收参数的模糊接口;接收推理计算机,发出的模糊结论并转换为所需输出值的反式界面[2]。
2.2模糊控制器的设计
在模糊控制器的设计期间,应考虑以下三个问题:模糊输入,建立语言控制规则和实际数字输出。
2.2.1模糊输入卷
集合x和y分别表示输入X和输出u的域。根据该实验平台中水下运动功能要求和水下机器人的实验数据的分析,使用模糊控制器的位置偏差和速度偏差的选择被用作音量。所需的推力是控制量u(t),其中具有位置偏差和速度偏差的理论域为[-0.5 m,0.5 m]和[-0.1 m/s,0.1 m/s]。
因为模糊是要确定域中输入X的相应语言变量值。为了促进项目的实施,通常对域离散,即应执行输入理论领域。
采用Mamdani提出的标准化设计将域的范围设置为[-6,6],以分离模糊控制器的输入体积范围。例如,输入X的域是[M,N],其量的量被转换为[-6,6]间隔的数量量。使用以下公式[2]:
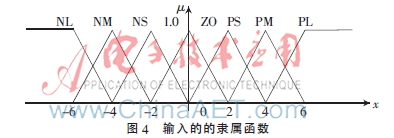
选择三角关联函数以绘制语言变量值分布图,如图4所示。
2.2.2建立语言控制规则
模糊控制器的控制规则是基于人类思维推理的语言表示。模糊控制规则的具体形式是:如果结论先例。输入称为上一部分,输出称为结论。应该注意的是,在制定模糊控制器规则时,前部可能不需要包含所有输入。同时,规则库中有两个完全相同的规则[2]。
模糊控制器的控制体积应尽可能遵循以消除偏差,但同时,有必要确保系统的稳定性并防止系统被超级调整。根据该实验平台的水下机器人的实际情况,当水下机器人的位置偏差和速度偏差为负时,水下机器人在规定的轨道中。 Dazheng的控制量使水下机器人试图返回正确的轨道;当水下机器人的位置偏差为负且速度偏差很大时,水下机器人在规定的轨道中。目前,这种趋势可以帮助水下机器人按照规定的轨道行驶。通过选择适当的模糊条件语句并考虑水下机器人运动的实际情况kaiyun.ccm,您可以绘制模糊控制规则,如表1所示。

2.2.3输出体积的反差异
模糊推理的结果不能直接用作控制对象的控制。因为它是模糊的,所以它也需要反vag舌,并转换为执行机制可以实现的准确值[2]。抗风化的目的是通过模糊推理的模糊结论找到控制量的精确分布。目前,有许多抗斑点方法,本文采用了重力方法,也称为定性方法。它是所有抗模糊方法中最常用,最合理的方法。它的数学表达如下:
上述式积分符号指示输出模糊子集上所有元素的所有元素的代数点[2]。如果归属函数是一个离散域,则公式如下:
3模拟结果和分析
根据已建立的水下机器人数学模型,创建模拟系统,并使用本文中设计的模糊控制器在模拟系统中执行深度潜水实验。参考输入为4 m,系统的初始状态为零,采样周期为0.1 s。控制器的输出响应和运动响应如图5和图6所示。
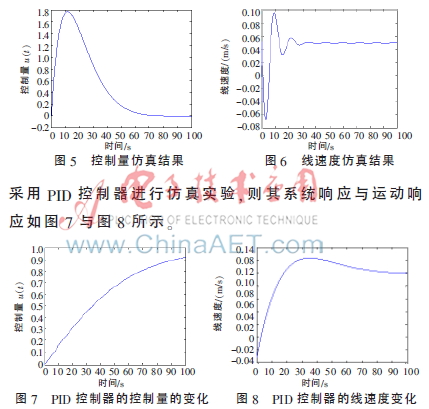
从图6可以看出,尽管速度在开始时发生变化,但是当系统响应逐渐达到稳定状态时,速度也稳定。如果使用PID控制器进行仿真实验,则其系统响应和运动响应如图7和图8所示。
比较这两种控制方法的仿真结果,很明显,在系统达到稳定性之前,模糊技术的控制器很大,但最终将是稳定的。 PID控制方法的仿真结果不是理想的。随着时间的流逝,PID控制方法的时间不是理想的。推动,速度继续发生变化,输出控制量也正在变化,没有平稳的趋势。
4
本文将机器人视为一个实验对象水下状态,并验证了应用于水下机器人的模糊技术的可行性。可以看到模糊控制器和PID控制器的模拟实验的比较。尽管该系统略高于PID控制系统,但无疑是系统稳定性的最佳选择。如今,模糊技术已被广泛使用,尤其是在处理那些非线性,强耦合或建模难度的系统时。但是,目前,模糊控制理论尚未达到成熟和完美的地步,并且需要在深入研究中。
参考
[1]江辛,冯北,王Xitang。水下机器人[M]。 Shenyang:Liaoning科学技术出版社,2000年。
[2] XI Aimin。模糊的控制技术[M]。 XI'AN:XI'AN电子科学技术大学出版社,2008年。






