大家好,我是水下机器人“ mengxin”。我来自中国科学院自动化研究所。我有许多著名的兄弟姐妹,例如“ Haidou 1号”,“ Qianlong No. 1”,“ Little Yellow Cain”,“等等,他们的数字经常出现在主要媒体中,使我的心生了!

(互联网图片)
作为Mengxin,我是大家伙面前的空气,但我不是(郭)。它们是巨大而复杂的,但水下不是灵活的。我的愿望是,就像芭蕾舞演员一样,我有一个草率的姿势,可以在水下跳舞。

(互联网图片)
结果,在中国科学院自动化研究所的海洋信息技术设备中心研究团队的帮助下,我的“芭蕾舞梦”充满了希望。
研究小组发现,限制水下机器人的移动性有两个方面。首先是水下机器人必须带一个“大腹部”才能潜入水中,即调节浮力系统,而工作的深度就越大,“腹部”越大。第二个是水下机器人的“短腿”,即水下螺旋桨,例如螺旋桨。为了承担更多的负载,现有的水下机器人使用效率高的螺旋桨螺旋桨,泵和注射式推动器,轮毂船训练器等,但是这些推动机改善了水下机器人的可操作性,尤其是在高速下高速时。性是平均水平。
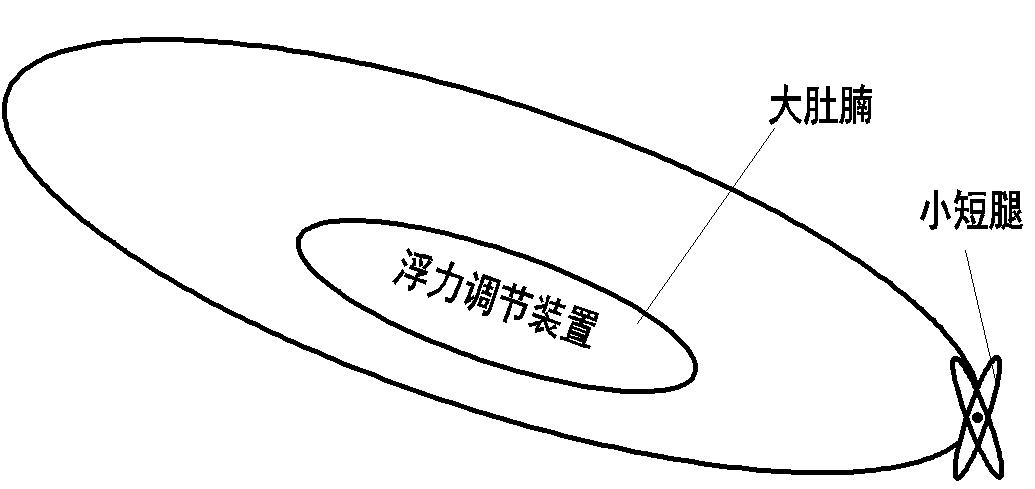
传统水下机器人的“大肚子”和“小腿”
为了解决上述问题,研究团队在学术界首次借用了“水下风扇螺旋桨”的概念,并成功地将其用于水下机器人安装“水下机器人的大长度”。取代了调节装置的浮力,并提高了水下机器人的迁移率。
水下风扇推动器可以定义为:“在水的环境中工作,嵌入固定机翼,嵌入可以积极旋转的流风扇的推动器中。”通过水平风扇的旋转,螺旋桨可以产生明显的前进方向。功率和垂直力。用向前的力向前抛光机器人,使用向下的垂直力将机器人推入水中,然后更换调节浮力调节装置。
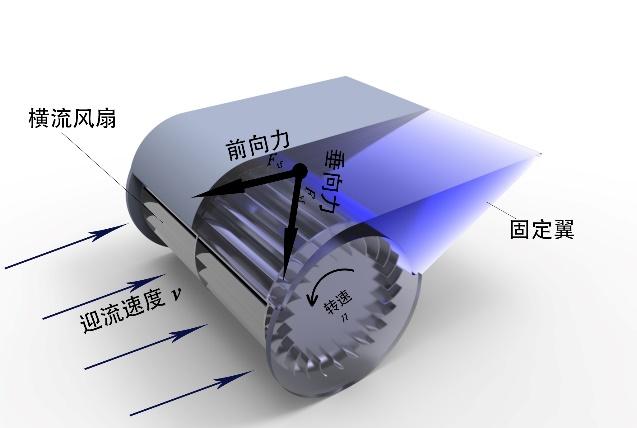
水下风扇推动仪表结构
根据水下球迷的推动者,研究人员开发了水下球迷(即kaiyun.ccm,我)。短腿被更改为两个“长腿”,可以实现进步,潜水,改变方向,投球云开·全站体育app登录,投球等。诸如水平震动之类的5度 - 自由运动运动也成功地减少了“浮力调节”的大腹部。

水下风扇载体(忘记开放美容/害羞/害羞/)
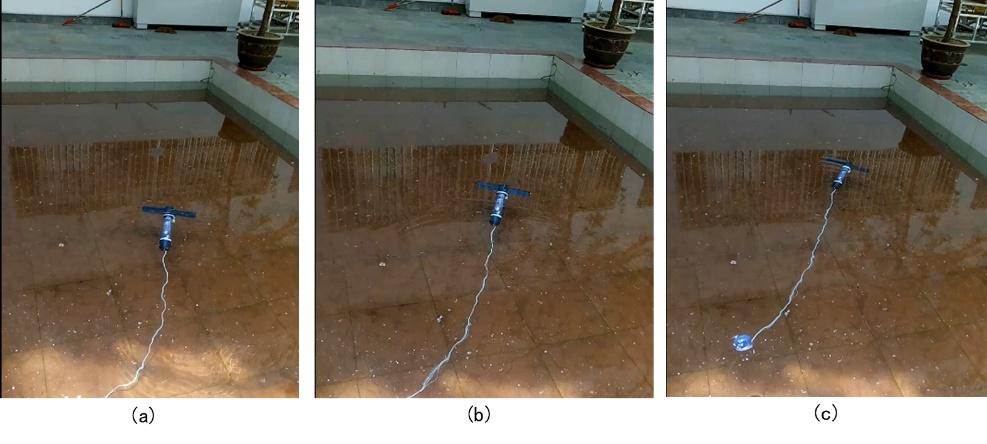
痕迹
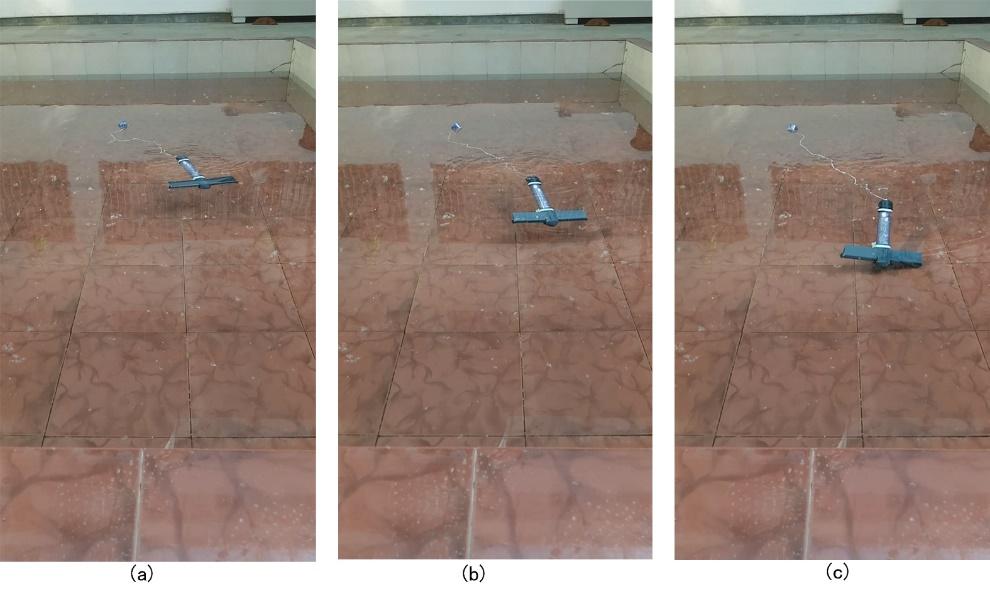
下沉

转动航行
研究人员还研究了水下粉丝推杆动态特征的深度研究,相关研究结果已在国际学术期刊海洋工程中发表了很多次。
首先,研究人员选择了水下风扇推动器的典型部分,以对不同水平风扇和水下风扇的速度进行模拟和实验研究。
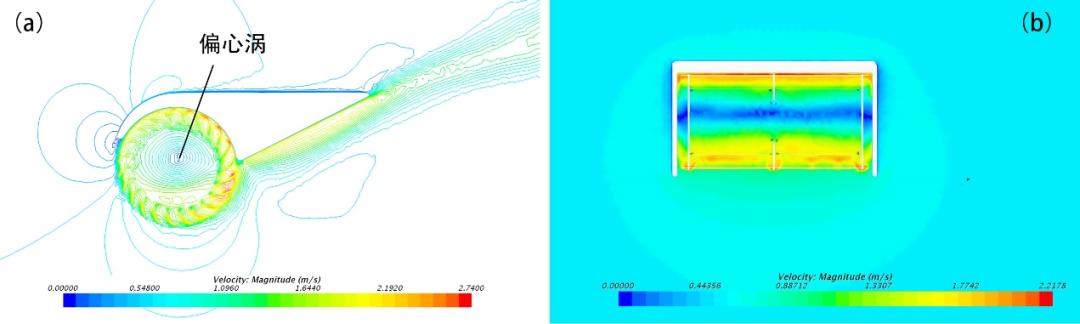
计算流体力学模拟(类似于“手绘X -rays”)
该研究的结果表明,水下风扇螺旋桨具有以下一般特征:
除了一般规则外,水下风扇螺旋桨还具有以下典型特征:
然后,研究人员选择了四个典型参数,包括前角,后角,机翼的平面长度以及流动角的流动角。本质
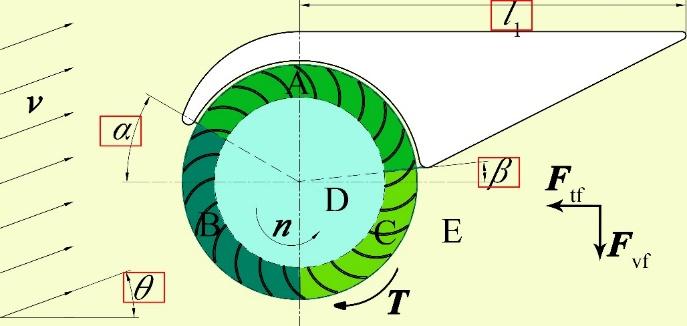
固定机翼的四个典型参数
研究结果表明:固定的机翼可以控制流动和流动的风扇流动和方向,并且还会影响某些特殊流体现象的形成,例如怪异涡流的位置和大小开yun体育app官网网页登录入口,涡流的边界,尾部涡流和机翼表面的表面。层间隔等
最近,研究人员还研究了参数的影响,例如水平风扇的内径和外径比,叶片的数量,叶片的内角以及叶片的外拐角对水动态和水力 - 声学特征的影响球迷推动器。
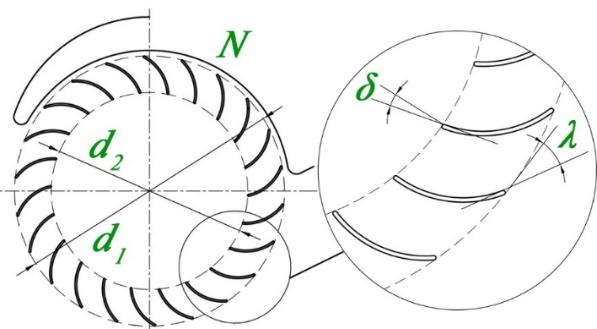
选择水平风扇的几何参数
研究结果表明,刀片叶片的内角和外角在流体的流动和流动的为风扇中起着重要作用。足够的工作主要受水平风扇的内径和外径比的影响。影响声学特征特征的最大因素。
水下风扇推动设备的研究得到了中国科学院战略创新基金,州研究基金委员会,新加坡学术研究基金和国家重要的机器人技术实验室的大力支持。
将来,研究人员将对水下风扇推杆进行更多的研究,包括水下风扇推杆的理论机制,模块化和实用的水下水下风扇促进者的开发,以帮助更多的水下水下水下水下水下水下水下水下机器人实现“芭蕾舞团”的“芭蕾舞”的实现。梦。






